Descripción general del producto
1.1 Descripción general
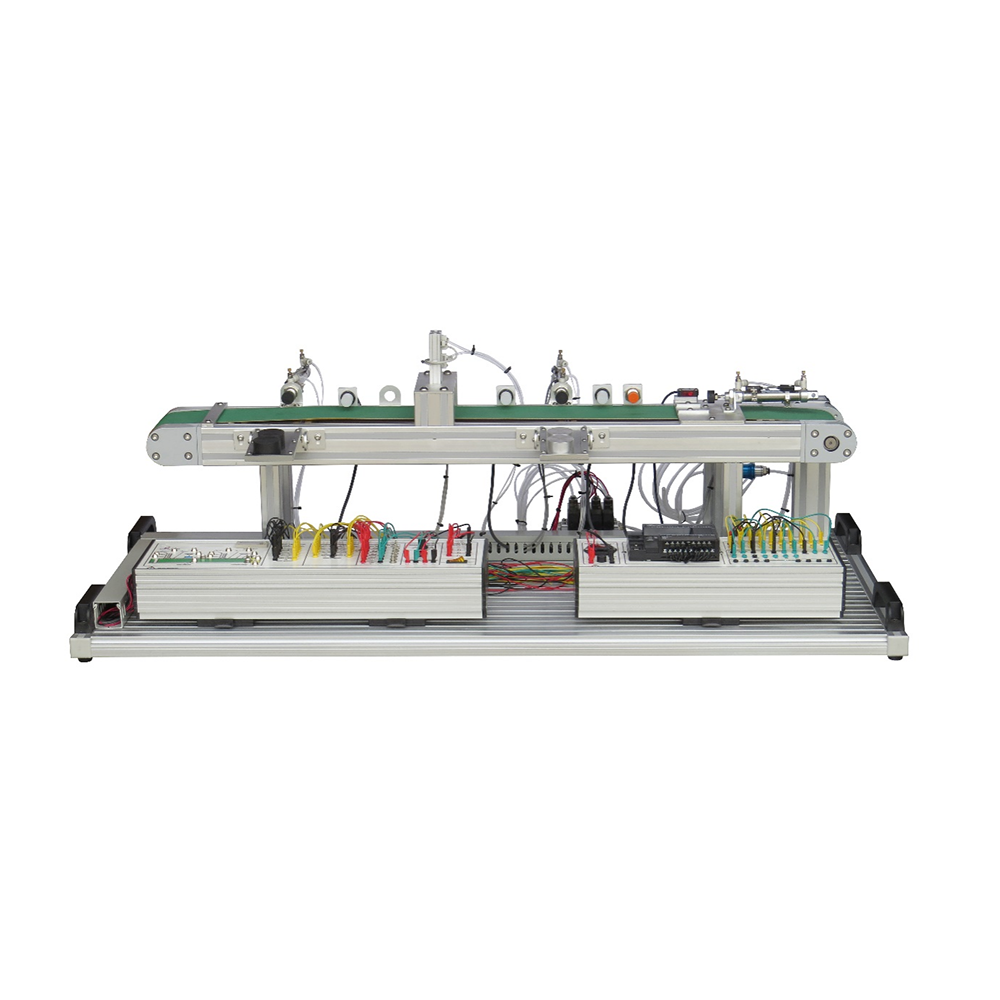
El sistema de control de cintas transportadoras es un sistema de formación práctica que simula completamente la línea de producción automatizada en una planta industrial. El sistema se combina con una línea de producción real de cintas transportadoras para maximizar la comprensión de los estudiantes sobre los sistemas automatizados de producción de cintas transportadoras. El sistema se compone principalmente de cilindros, electroválvulas, sensores, motores y controladores lógicos programables. Basado en una cinta transportadora, se instalan sensores en diferentes posiciones para detectar los objetos transportados en la cinta. Al introducir la señal del sensor en el controlador lógico programable, según los requisitos de control, la señal de salida del PLC controla la electroválvula y el cilindro para realizar la clasificación y el conteo de los objetos en la cinta transportadora.
Este dispositivo de capacitación se compone principalmente de diversos tipos de sensores industriales, unidades de control neumático, interruptores eléctricos, controladores lógicos programables PLC, etc., y constituye un sistema electromecánico que consta de áreas de trabajo como unidades de alimentación, unidades de transporte, módulos de detección y almacenamiento clasificado. Integra una plataforma mecánica con equipos. Mediante experimentos relevantes, podrá familiarizarse con las características operativas de los actuadores de sistemas neumáticos, el modo de conexión entre sensores industriales y PLC, dominar las habilidades de programación de PLC, etc., y desarrollar los conocimientos y habilidades correspondientes de los estudiantes. Es adecuado para escuelas profesionales superiores, colegios universitarios, escuelas profesionales secundarias y escuelas técnicas. Enseñanza profesional relevante y evaluación de la formación profesional.
1.2 Características
(1) La plataforma de entrenamiento utiliza un sustrato de aleación de aluminio para construir una plataforma de entrenamiento de escritorio, que se puede mover con flexibilidad. Cada módulo de actuador está ubicado en la placa base, lo que facilita su uso y evita daños.
(2) La unidad de control PLC adopta una estructura de caja colgante y está fijada sobre un sustrato de aleación de aluminio, lo cual la hace segura y confiable. Todas las entradas y salidas del PLC están conectadas a terminales enchufables, lo cual facilita la conexión de los estudiantes durante la capacitación. El sensor de detección y la válvula solenoide de control del actuador están conectados a los terminales del panel de la caja colgante de la unidad de control y cuentan con una luz indicadora que muestra el proceso de operación.
(3) Integra orgánicamente tecnología mecánica (incluida la tecnología neumática), tecnología de sensores, control PLC y otras tecnologías, reflejando las características del proceso de producción de la manufactura moderna. La estructura general es abierta, y el contenido de los módulos se determina según el principio de contar con funciones productivas e integrar funciones de aprendizaje, de modo que los módulos requeridos se puedan seleccionar fácilmente durante la docencia o la competencia.